Label Efficient Multi-Camera Broiler Localisation
Understanding and monitoring the behavior of broiler chickens is essential for ensuring their welfare and optimizing farming practices. Traditionally, researchers rely on manual video observations to study broiler behavior, which is time-consuming and labor-intensive. In the WISH ICON project, we aimed to automate this process by developing a multi-view detection system to localize broilers efficiently.
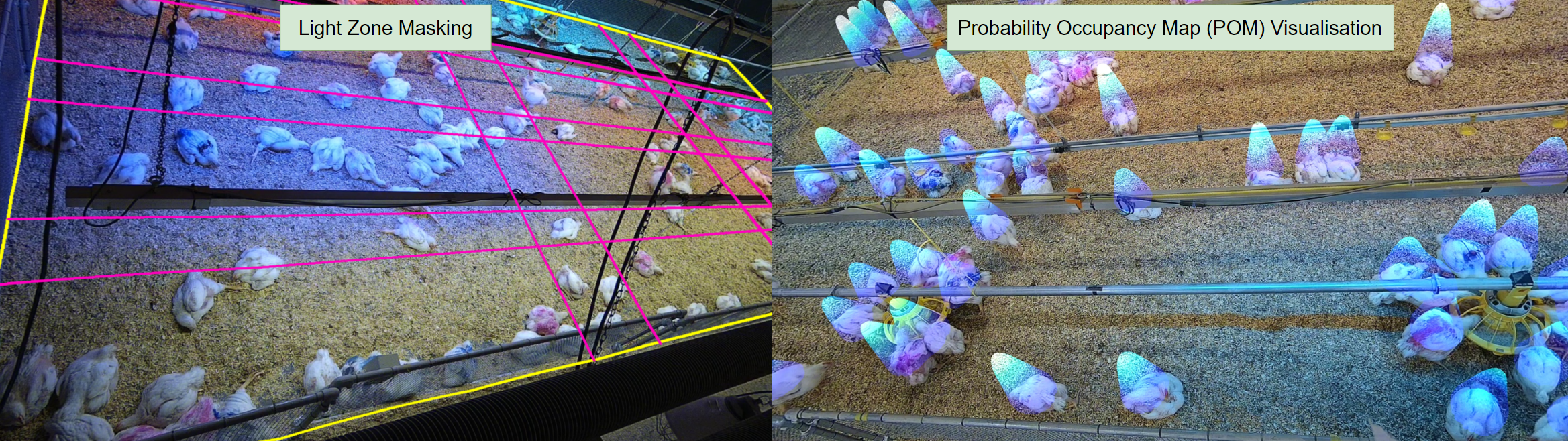
One of the key experiments was to determine the light preference of broilers by providing different light recipes within the same pen and allowing the broilers to choose freely where they go.
To accurately capture the preferences and behaviors of broilers, it’s crucial to monitor their positions continuously. However, due to occlusions and the need to cover a large area, a multi-camera setup is necessary. Multiple cameras ensure that all broilers and zones within the pen are visible, providing comprehensive data for analysis.
Leveraging Pseudo Labels for End-to-End Training
Merging detections from multiple cameras into a unified view requires precise calibration and fusion techniques. The geometric fusion approach projects detections from individual cameras onto a common ground plane using calibration parameters. While effective, this method can be sensitive to calibration errors and does not leverage the full potential of deep learning.
Deep learning methods offer improved performance but typically require extensive ground plane annotations for training, which is impractical for broilers due to their high density and the lack of specialized labeling tools.
To overcome this challenge, we propose using pseudo labels generated from the geometric fusion method to train an end-to-end multi-view detection model without the need for manual ground plane labels.
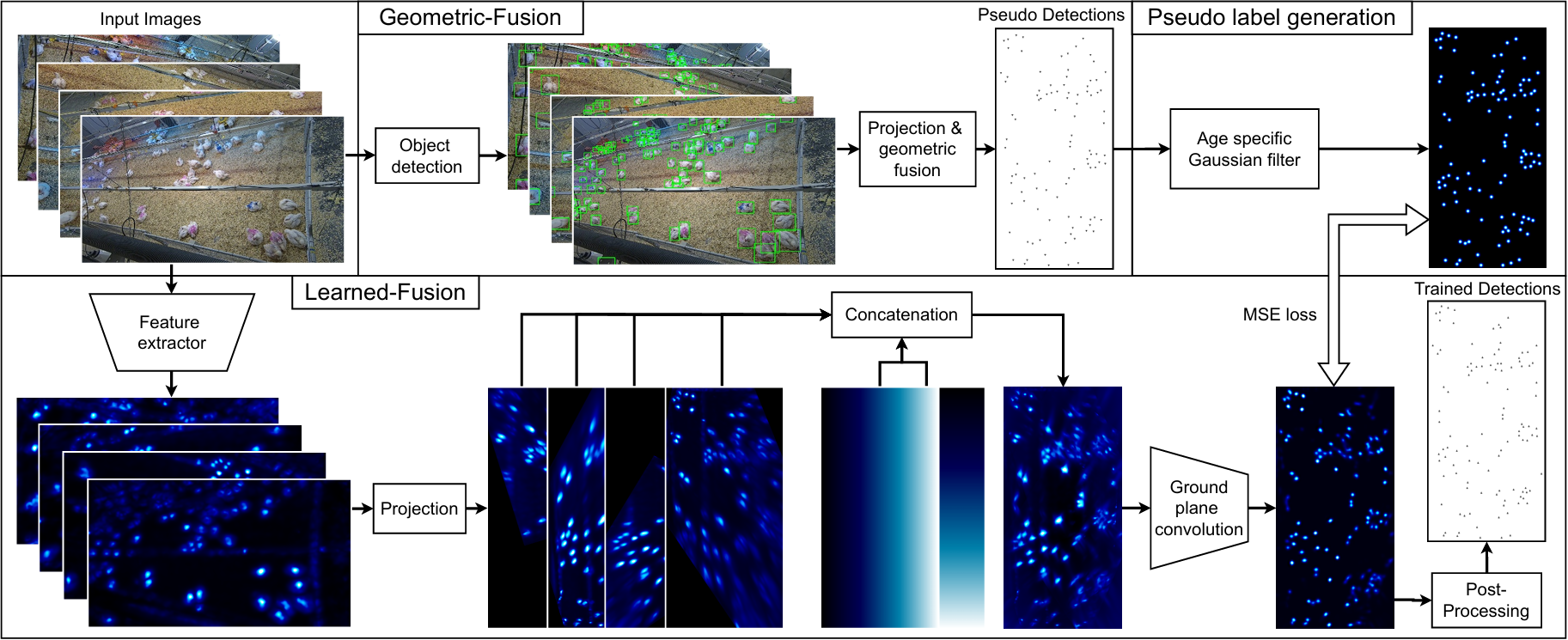
Our approach involves the following steps:
-
Single-View Detection: We detect broilers in each camera view using a YOLOv8 object detector.
-
Geometric Fusion: The detections are projected onto the ground plane, and overlapping detections from different views are merged.
-
Pseudo Label Generation: The fused detections serve as pseudo labels for training.
-
End-to-End Model Training: We train the MVDet architecture using the pseudo labels, allowing the model to learn the fusion process end-to-end.
By using pseudo labels, we eliminate the need for manual annotations and enable the model to correct errors from the geometric fusion, such as misaligned detections due to calibration inaccuracies.
Age-Specific Kernels for Improved Detection
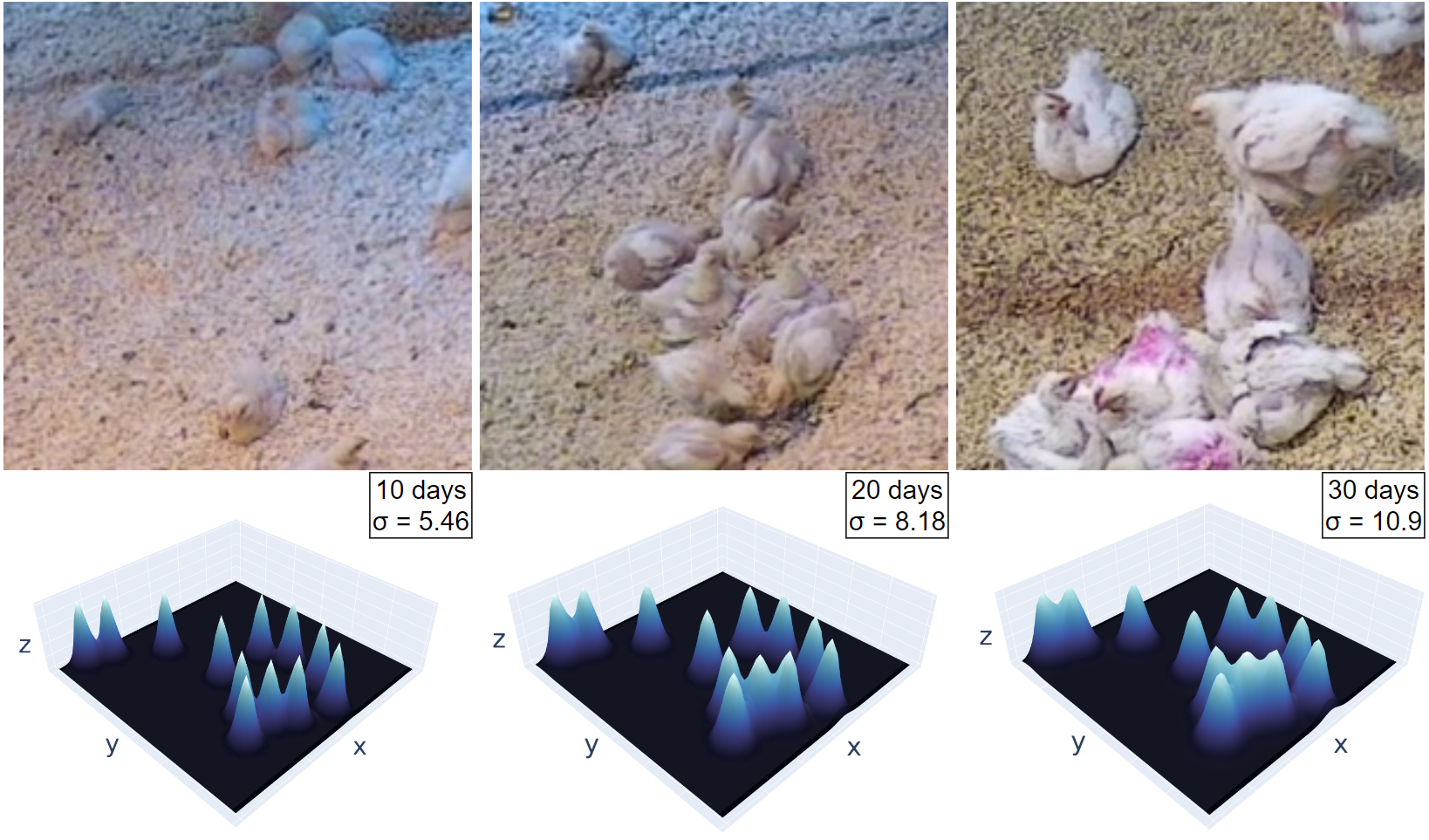
Broilers grow rapidly, and their size changes significantly over time, affecting detection performance. To address this, we introduce age-specific Gaussian kernels during training.
These kernels adjust the receptive field of the model to match the size of the broilers at different ages, allowing it to learn distinct features for each growth stage. This adaptation results in better localization across all ages.
Results and Analysis
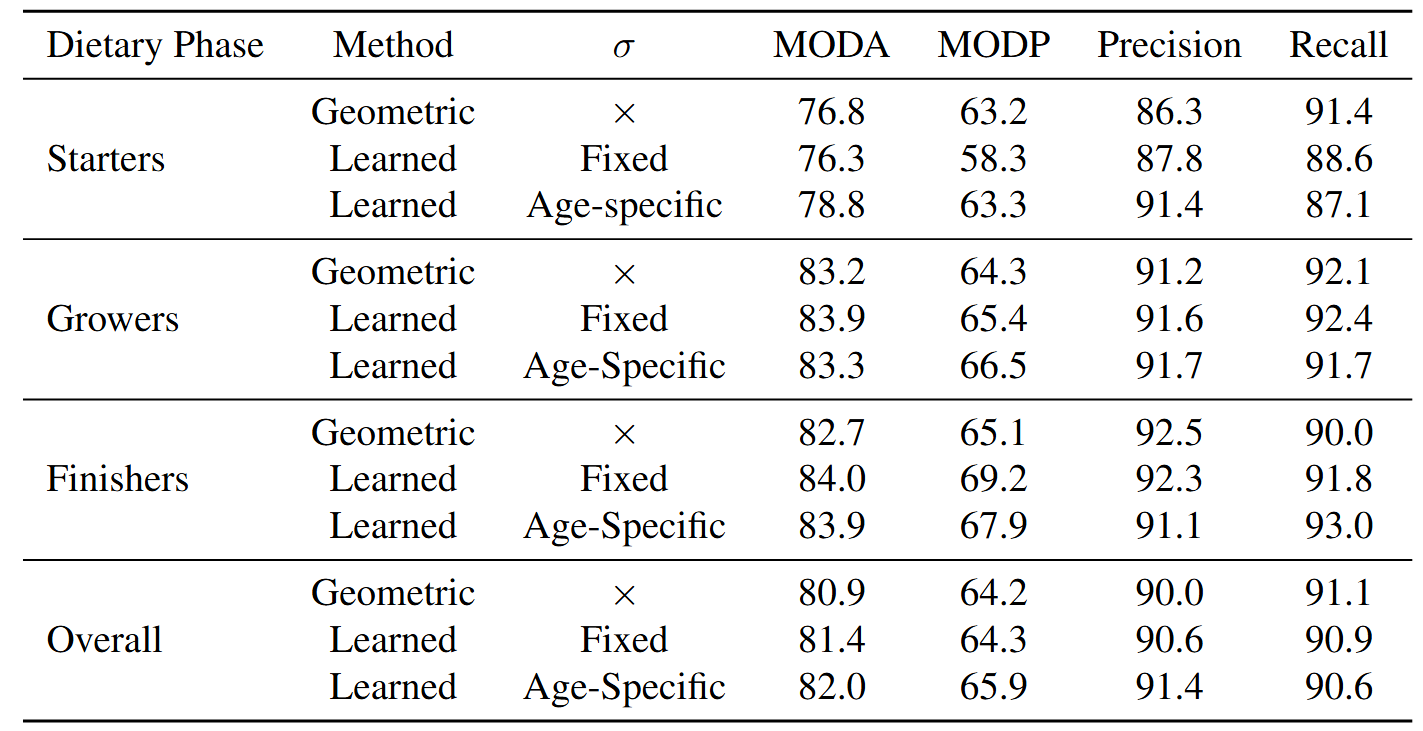
Our experiments demonstrate that the learned-fusion model trained with pseudo labels and age-specific kernels outperforms the geometric fusion approach.
-
Performance Improvement: The learned-fusion model achieves a higher Multi-Object Detection Accuracy (MODA), especially when using smaller YOLOv8 object detectors. This indicates that our method is particularly beneficial when the initial detections are less accurate.
-
Effectiveness Across Ages: The incorporation of age-specific kernels leads to consistent performance improvements across different broiler ages, ensuring reliable detection throughout the broilers’ lifecycle.
Our approach demonstrates that training an end-to-end multi-view detection model using pseudo labels can significantly enhance performance without the need for extensive manual labeling.
Conclusion
By leveraging pseudo labels and age-specific kernels, we present a label-efficient method for multi-camera broiler localization that improves detection accuracy across all growth stages. This approach facilitates automated monitoring of broiler behavior and preferences, contributing to better animal welfare and more efficient farming practices.
Our findings highlight the potential of combining geometric fusion with deep learning in scenarios where manual labeling is impractical. Future work includes extending this method to larger-scale deployments and exploring its application to other types of livestock.
For more details, please refer to our paper.